States-based models
搜索优化
- Tree search
- 树搜索
- Backtracking search
- 回溯搜索
- Breadth-first search (BFS)
- 广度优先搜索
- Depth-first search (DFS)
- 深度优先搜索
- Iterative deepening
- 迭代加深
| Algorithm | Action costs | Space | Time |
|---|---|---|---|
| Backtracking search | any | ||
| BFS | |||
| DFS | 0 | ||
| DFS-Iterative deepening |
- - 每个状态的操作数量
- - solution depth - 解的深度
- - 最大深度
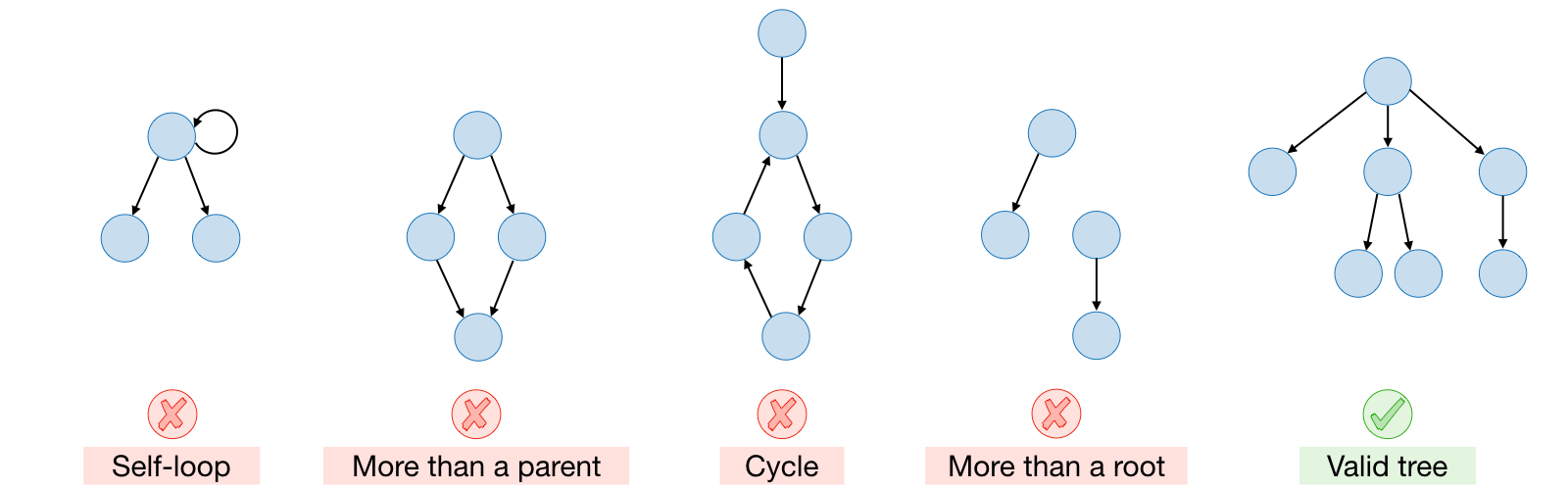
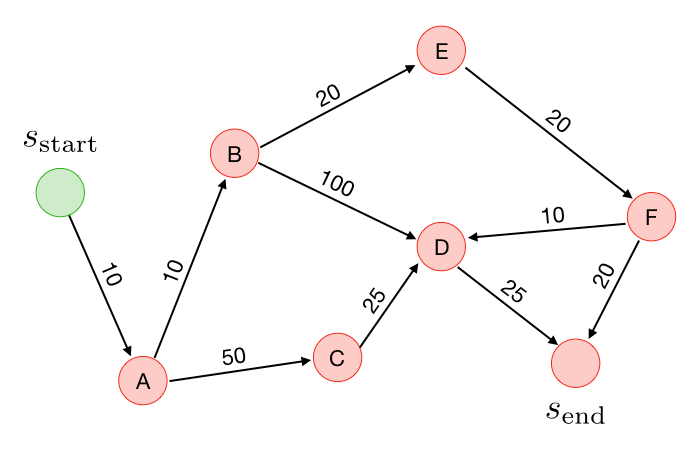
Graph search
- Dynamic programming - DP
- 动态规划
- backtracking search + memoization
- Explored
- Frontier
- Unexplored
- Uniform cost search - UCS
- 统一代价搜索
- Dijkstra's algorithm
- 不支持 negative action costs
- Dijkstra's algorithm
| Algorithm | Acyclicity | Costs | Time/space |
|---|---|---|---|
| Dynamic programming | yes | any | |
| Uniform cost search | no |
Learning costs
- Structured perceptron
- 结构感知机
- search
- 搜索